Recent Advances in Visual Sensing and Machine Learning Techniques for in-situ Plankton-taxa Classification
Abstract:
Approaches providing taxonomy estimates from time-series image analysis (Sosik and Olson 2008) or via computer simulations (Roberts and Jaffe 2007), with the recent advances in deep learning, enabled by the computational power of multicore CPUs and GPUs, made possible processing and classification of large datasets while learning higher level representations. Enhanced traditional machine learning methods are driven by multiple kernel learning, where general features are combined with robust features and new types from multiple views are defined in order to generate multiple classifiers (Py et al 2016; Dai et al 2016; Lee et al 2016; Moniruzzaman et al 2017).
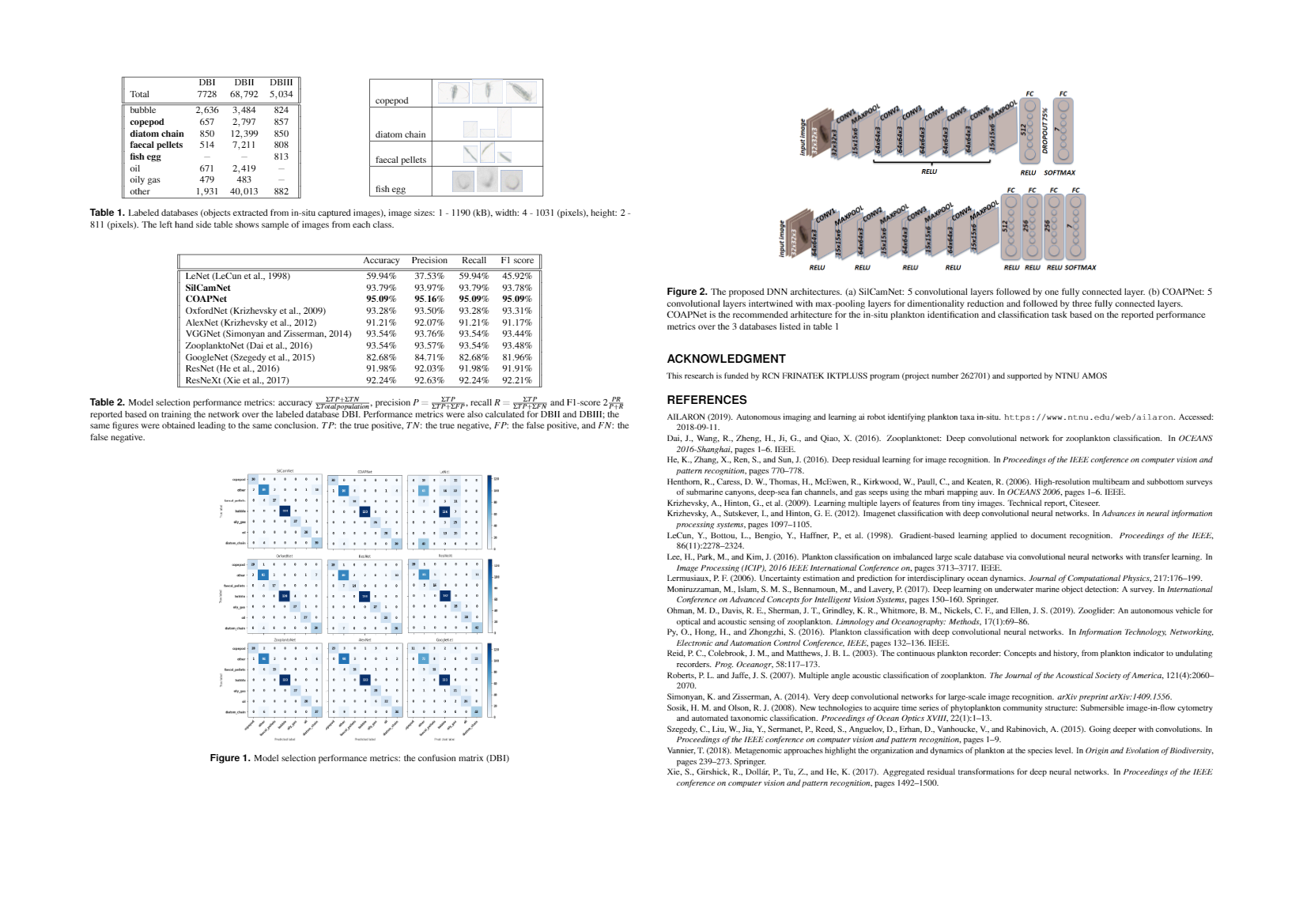
In this paper, we present recent DL methods for microscopic organisms’ identification and classification. A proposed DL architecture (cf. figure 2) reported an accuracy of 95% as opposed to (90% - 93% cf. table 2) achieved by the state-of-the-art networks: ZooplanktoNet, VGGNet, AlexNet, ResNet, and GoogleNet, while training over a labeled dataset of extracted objects from images of plankton organisms captured in-situ (cf. table 1). COAPNet is embedded into a light-weight autonomous vehicle (LAUV) for real-time in-situ plankton taxa identification and classification. The LAUV in turn utilizes the feedback from the image analysis to constantly update a probability density map that further enables an adaptive sampling process.