Rotational motion compensation towards precise wind speed measurement on the sea
Rotational motion compensation towards precise wind speed measurement on the sea
Abstract:
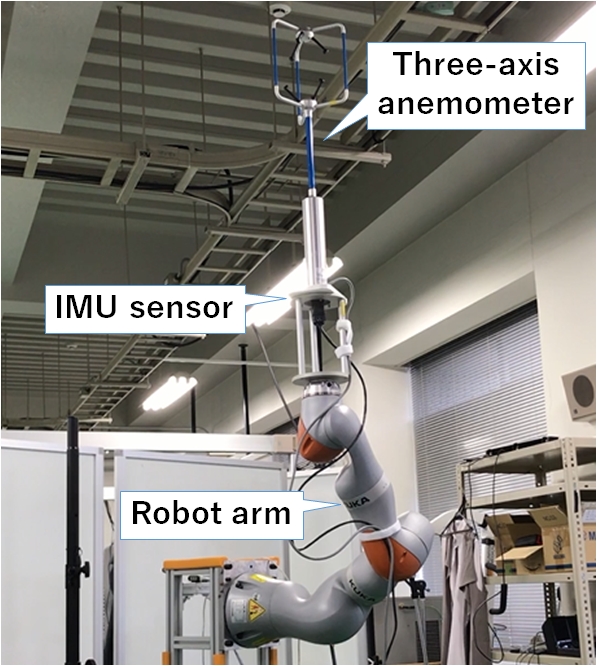
The establishment of the detailed mechanism of air-sea momentum transfer is one of the important issues for improving the prediction of climate change. The wind stress has generally been calculated from the eddy correlation method. Therefore, it is necessary to measure the horizontal and vertical wind components using the three-axis sonic anemometer, in order to improve the estimation accuracy of the wind stress. A buoy type measurement system is useful to measure the wind stress in many sea surface conditions. However, the movement of the buoy due to waves and wind causes measurement errors of the wind speed. In this study, we propose the rotational motion compensation method using an inertial measurement unit (IMU) sensor and verify the proposed method using the simulation and the robotic experiment. We assume that the short period movement of the buoy is on a sphere with an arbitrary radius to reduce the measurement error of the IMU sensor. The rotational motion of the buoy is calculated from the acceleration, angular velocity, and geometric constraints of the motion. The geometric constraints are as follows : 1. The distance from the current sensor position to the center of rotation is the same as the distance from the previous position to the center of rotation, 2. The rotation angle calculated from the accelerometer using the cosine theorem is the same as the rotation angle obtained from the gyro sensor. The effectiveness of the proposed method is verified by the simulation and the robot arm experiment. The reciprocating rotational motion (-45 to +45) on one axis is used. In the simulation, the grand trough of the wind speed is 0 m s^{-1} and the estimated wind speed using the proposed method is 6.1 x 10 ^{-8} m s^{-1}. In the robot arm experiment, the ground trough of the wind speed is 0.04 m s^{-1} and the estimated wind speed using the proposed method is 0.46 m s^{-1}. This result indicates that the movement of the buoy can be corrected by the proposed method.