Autonomously Mapping the Evolution of an Introduced Dye Tracer for Water Resource Management in Regions of Frequent Drought
Autonomously Mapping the Evolution of an Introduced Dye Tracer for Water Resource Management in Regions of Frequent Drought
Abstract:
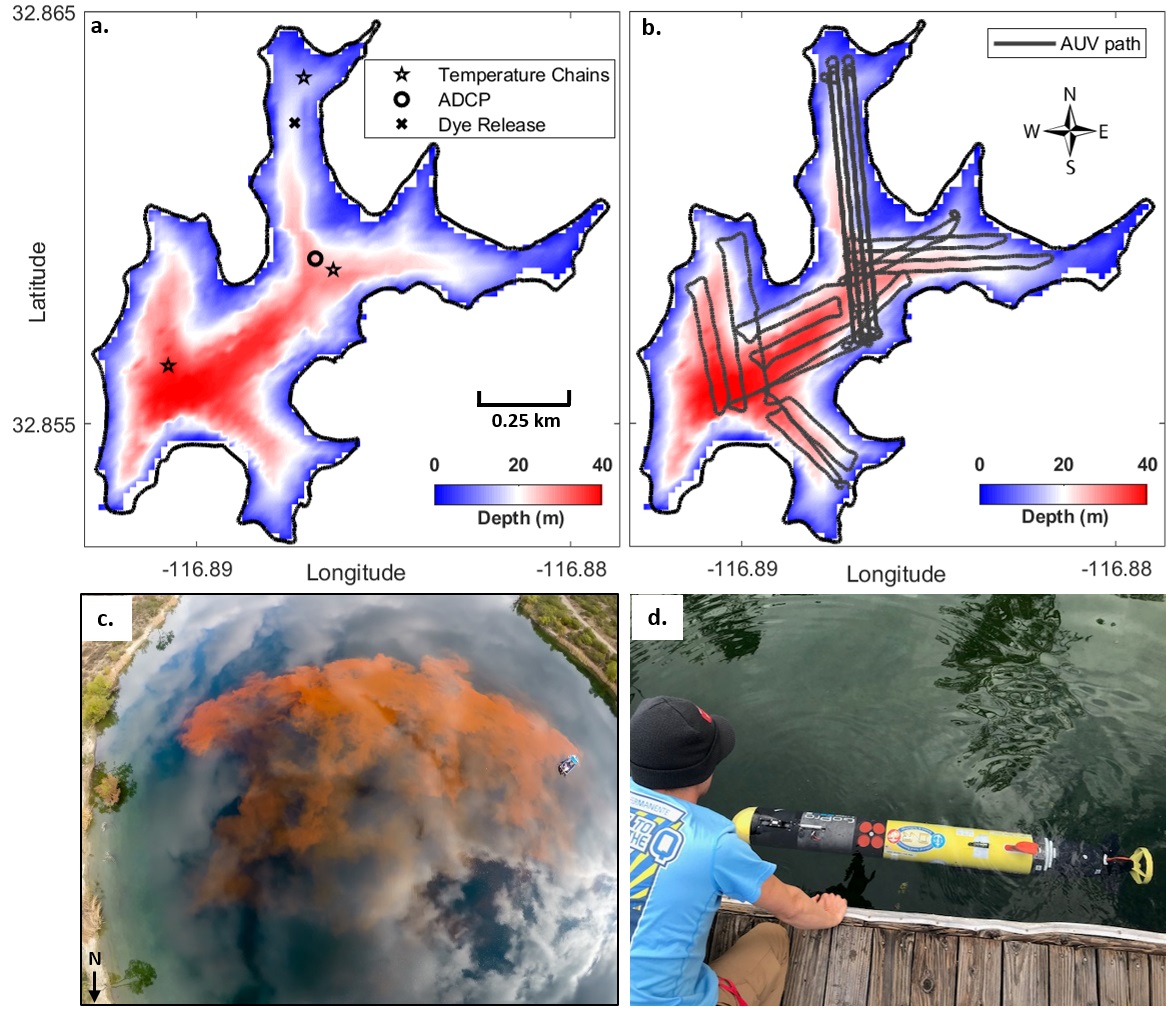
Emergent autonomous technology has been widely applied in the field of oceanography, yet applications in the field of limnology remain limited due to the challenges of operating autonomous vehicles in confined environments. In shallow reservoirs or lakes, careful consideration needs to be taken when planning AUV missions to avoid vehicle fouling. Here we report on autonomous underwater vehicle (AUV) survey methods used to map the spatial and temporal evolution of an introduced dye tracer in a small reservoir, providing quantifiable data of the convective processes that drive transport and mixing. The tracer served as a surrogate for advanced treated water that is proposed to be introduced into a reservoir as part of an overall system for efficient water reclamation; a critical management tool for addressing water issues facing drought prone regions, such as southern California. Sensors integrated onto the AUV observed horizontal temperature gradients resulting from differential cooling of the reservoir that quickly migrated the dye out of the shallow side-arm where it was introduced. The resulting dispersion of the dye throughout the reservoir was well captured by the sampling resolution of the AUV providing three-dimensional data sets of complex convective processes that were used to validate a numerical lake/reservoir model. The operational efficiency, adaptive sampling capabilities, and resolution of observations make the AUV an appealing alternative compared to traditional boat-based survey methods for rapidly assessing lakes and reservoirs. The study demonstrates the utility of an AUV in a small reservoir, providing the framework for increased use of autonomous vehicles in future limnology studies.