Cross-Domain command and communications synergies towards more effective cooperative missions
Paulo Dias1, Michael Incze2, Keila Lima1, Maria Costa1, Manuel Ribeiro1, Joao Tasso Borges de Sousa1, Joshua Baghdady3, Ben Jones4, Noah Hafner3, A. Zachary Trimble5, Margo Edwards3 and Raymond Andrade5, (1)University of Porto, LSTS, Department of Electrical and Computer Engineering, School of Engineering (FEUP), Porto, Portugal, (2)Naval Undersea Warfare Center, Division Newport, Newport, RI, United States, (3)University of Hawai'i, Applied Research Laboratory, Honolulu, HI, United States, (4)University of Hawai'i, Applied Research Laboratory, Honolulu, United States, (5)University of Hawai'i at Mānoa, RIP Laboratory, Department of Mechanical Engineering, Honolulu, HI, United States
Abstract:
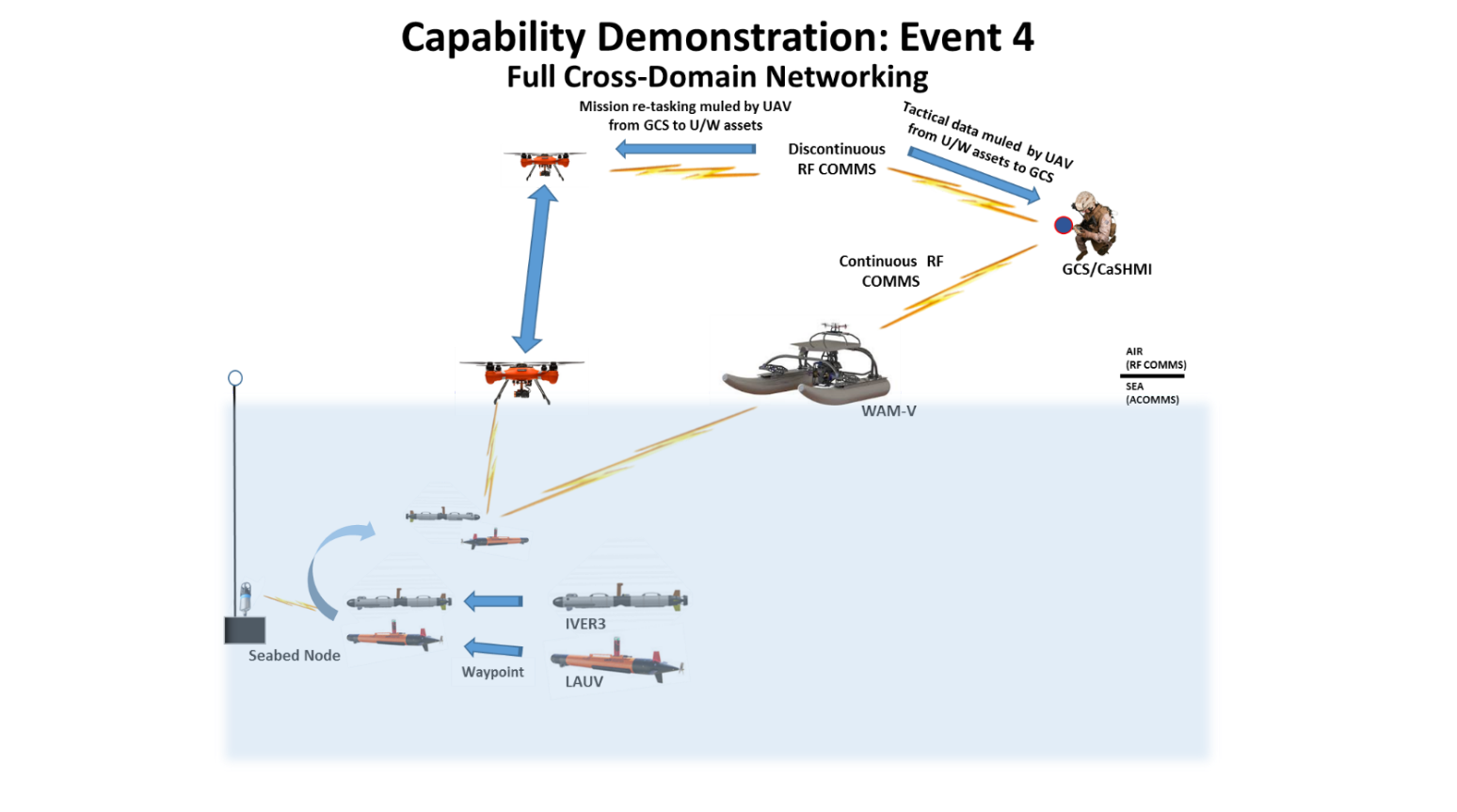
The efforts of individual agencies in achieving component-level development were brought together in FY19 with a partnership under the Cross-Domain (UxS) Command, Control, and Communications (CDC3) project. This was identified as a 1-year, 3-phase development and demonstration project with the Naval Undersea Warfare Center Division Newport (NUWC), the University of Hawaii Applied Research Lab and College of Engineering (UH ARL), the University of Porto Engineering College (Portugal) (U Porto), L3 Harris (L3), and Office of Naval Research (ONR). In keeping with the development strategy, CDC3 was primarily a software development and integration project, using existing UxS from each of the partners and bridging native control architectures with common services to establish a cooperative network of cross-domain (air/surface/undersea) UxS that could meet Command, Control, and Communications requirements for coordinated UxS operations in a scenario developed for CDC3.
The coordinated operation of multiple unmanned systems (UxS) as components of a cohesive fleet resource to provide a rapid, low-cost step function increase in UxS contributions to mission effectiveness. This strategy enables UxS resources to work cooperatively on mission goals regardless of vendor, physical domain (air/surface/undersea), or originating Command unit, and it provides optimization of resources, improved timeliness and effect in response to evolving tasking. In contrast to traditional UxS development, this approach would have a software focus, and specifically, it would address Command, Control, and Communications capabilities with a system-agnostic implementation. Adoption of standard architectures and services would ensure efficient and effective development and maintenance of applications and transition of capabilities to proprietary systems to improve native function and to support system interoperability and common control.
Once established tools to express mission requirements, different scenarios can be hereafter described in this system, and deployed into UxS networks.