HROV Ariane – a reversible optical tether controlled vehicle for observation and intervention down to 2500m depth
Abstract:
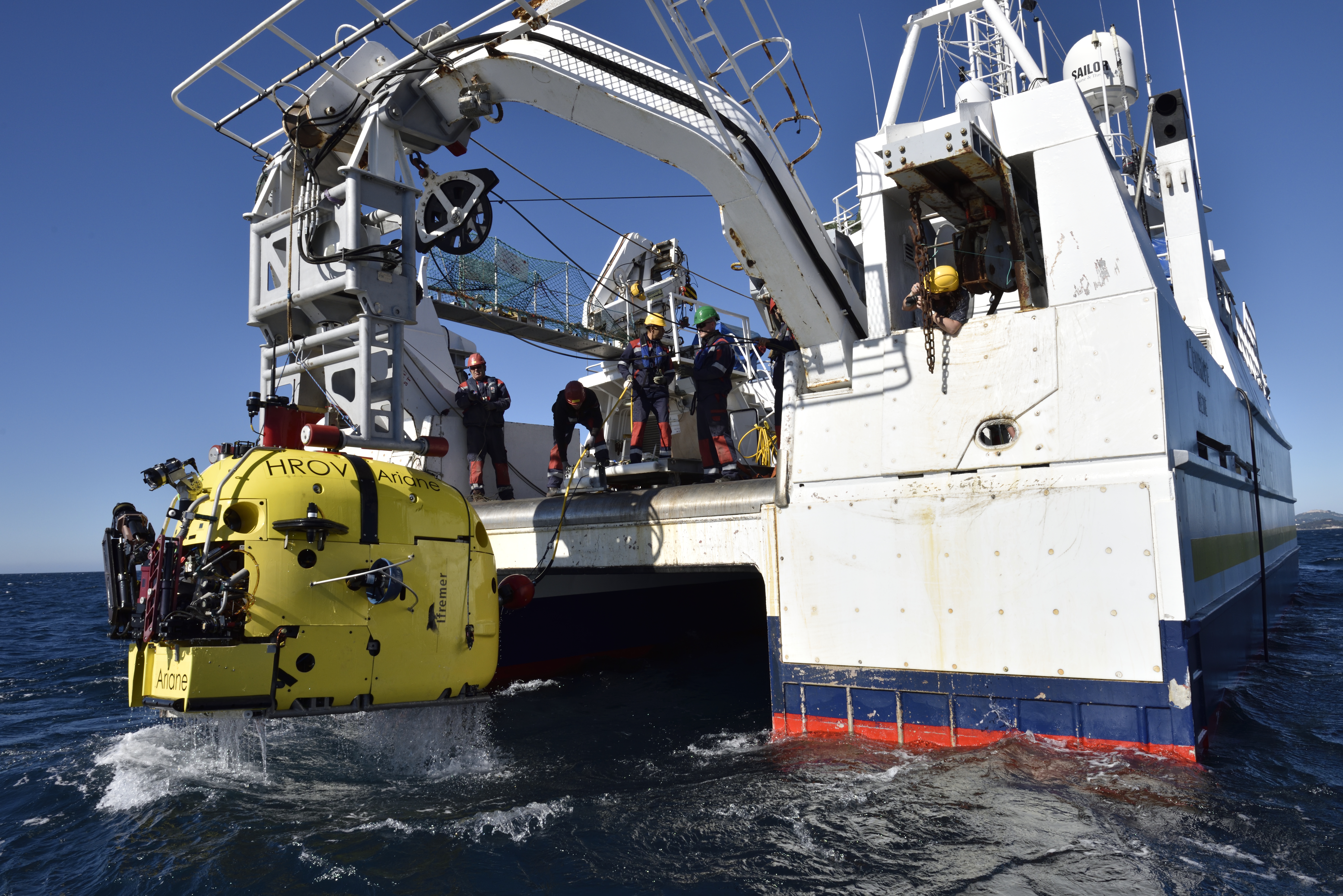
Ariane was commissioned in the beginning of 2017 after 6 years of concept studies, development and technical sea trials for an opening cycle of scientific cruises. Ariane currently counts more than 130 dives. The talk will review Ariane’s technical features and functional capabilities in the light of feedback from scientific operations. The reversible tether management is a key feature. It allows working from vessels without DP capabilities which are not able to accurately station-keep. Operation capabilities from such non-specialized vessels make the system’s 2500m depth observation and intervention features available for reduced cost and increased scheduling flexibility, compared to conventional work class ROV.
Ariane meets the scientific community's requirements with a range of outstanding functional features:
- The propulsion system, navigation and observation instruments are specifically designed for work on slopes and cliffs in underwater canyon environments – observation, systematic survey and sea-floor intervention can be carried out on slopes up the vertical.
- 3D real time modeling is provided for piloting and comprehension of the vehicle’s topographic situation.
- HD-video and a tilting 24Mpixel still photo camera provide high quality optical imaging privileging 3D reconstruction scaled and geo-referenced by high end inertial navigation.
- A pair of electric manipulator arms (7-fuction and 5-function) allow for complex intervention tasks with lifting capabilities up to 30kg.
- High resolution multi-beam mapping with a wide swath - triple-frequency (200, 300, 400kHz) device is available in a specific payload configuration that can be oriented at 0°, 45° or 90° to the vertical.
- Hydrodynamic fairing improves navigation in coastal environments with tidal and marine currents.