Towards the development of a small optically tethered underwater vehicle (OTV) for minimally invasive ocean-floor observations
Abstract:
The initial design specifications are calling for a relative small vehicle, capable of carrying an optical payload (high resolution cameras and light) for ultra-high definition optical mapping.
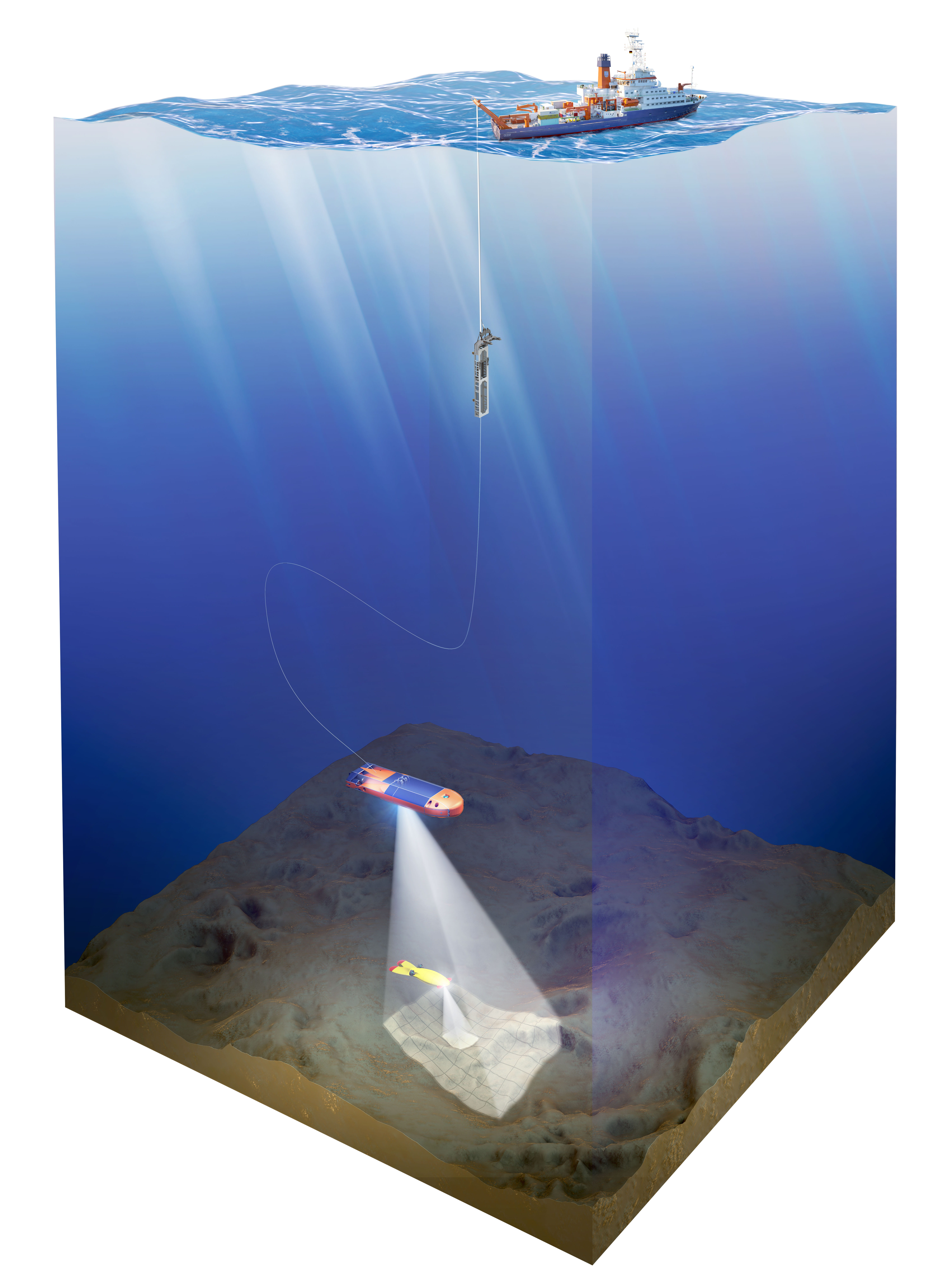
A particular requirement of the system is for the vehicle to be minimally invasive, as not to perturb the seafloor – water column interface. For that reason we decided not to go with a hovering vehicle concept and but rather with a slow moving cruising style vehicle.
The detailed CFD based hydrodynamic design, taking slow moving speeds and the need for high maneuverability into account, resulted in an unconventional design (see Figure) with large control surfaces at the stern and two small control surfaces at the bow. To further reduce the potential of thrust jet impingement on the seafloor the thrusters were placed forward and above the large control surfaces, necessary for slow speed maneuverability. Initial hydrodynamic simulations indicate the desired high maneuverability can be achieved with the current design without significant water velocities directed towards the seafloor.
We are currently testing and developing some of the sub-components and expect to conduct initial trials in 2020.