Investigation of UAS-based SfM Photogrammetry and Bathymetric Inversion for Mapping a Shallow Water, Low-energy Littoral Zone
Abstract:
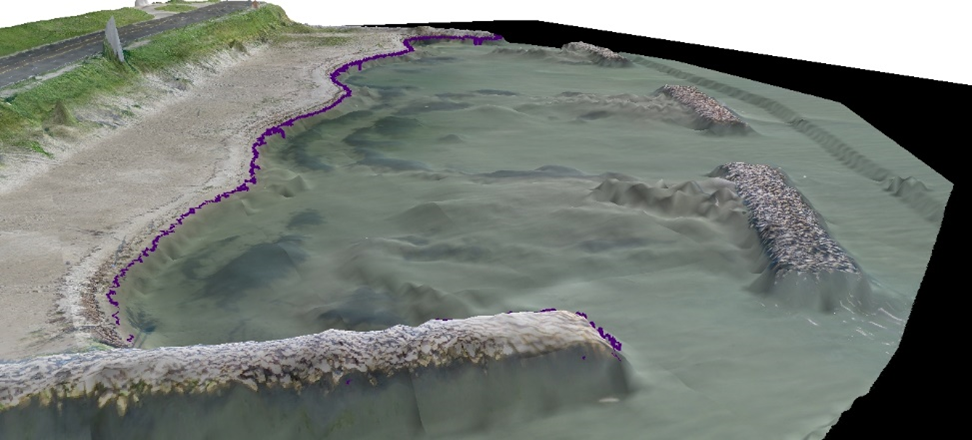
This study examines the accuracy of topographic and bathymetric data derived from a UAS-based photogrammetric survey of a low-energy, shallow-water littoral zone. The study site is, an engineered and restored beach, located on Ward Island in Corpus Christi Bay, TX. Two UAS surveys were conducted roughly two months apart using a system called the SenseFly eBee. The eBee is an ultra-lightweight (~0.7 kg) fully autonomous platform and it was equipped with a 16 megapixel RGB camera. The objectives were to: (1) assess accuracy differences in SfM derived point clouds over exposed and submerged beach; (2) evaluate effects of scene-to-scene variability and flight design on derived data products. Several key components were analyzed in order to assess the accuracy and usefulness of elevation data derived from the UAS/SfM approach. First, a sensitivity analysis was conducted to examine the impacts of image scale and match constraints on the fidelity of 3D point cloud data derived from the SfM processing workflow. Evaluation focused on differences in accuracy and density of point data over exposed and submerged beach. Second, a noise filter was developed to remove non-subtrate returns from the SfM cloud for bathymetric modeling. Finally, a bathymetric inversion approach was applied to derive an estimate of water depth. Results show that bathymetric inversion is a promising method in shallow-water when calibration data is present. SfM tends to breakdown resulting in noiser data with many spurious returns. Data fusion of the SfM product with the bathymetric inversion product enabled generation of a seamless DEM of the exposed and submerged topography.